Work in progressThis site is under construction — content, figures and specifications are provisional.
PFD · ch.flysys.pfd
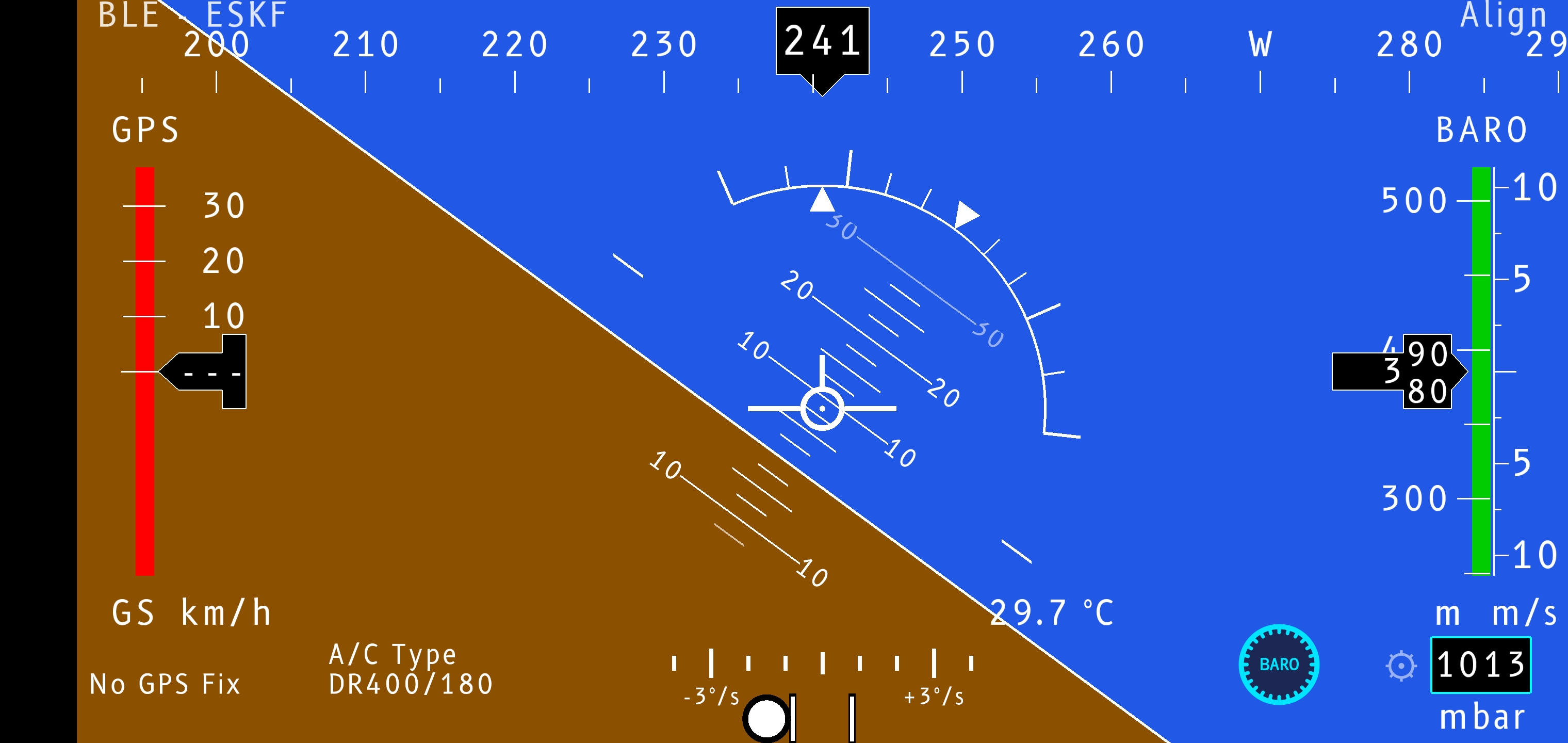
Primary flight display for experimental aircraft.
Attitude, ground speed, altitude, vertical speed, slip and heading — estimated
on-device from an external BLE IMU and rendered in OpenGL ES 3.
No moving map, no engine page. One instrument, done precisely.
A self-contained Android application. The display you fly is validated
offline against recorded flight logs — identical processing, reproducible
result.